
4 min read
Sols 4357–4358: Turning West

Earth planning date: Wednesday, Nov. 6, 2024
Sols 4357–4358: Turning West
If you’ve ever driven down a road that’s in need of repaving, you’ll know that it can be an uncomfortable experience. The same is true on Mars: even at our carefully slow driving speed, the rough, rocky terrain that we’ve found ourselves in since entering Gediz Vallis many months ago continues to present challenges for our intrepid rover.
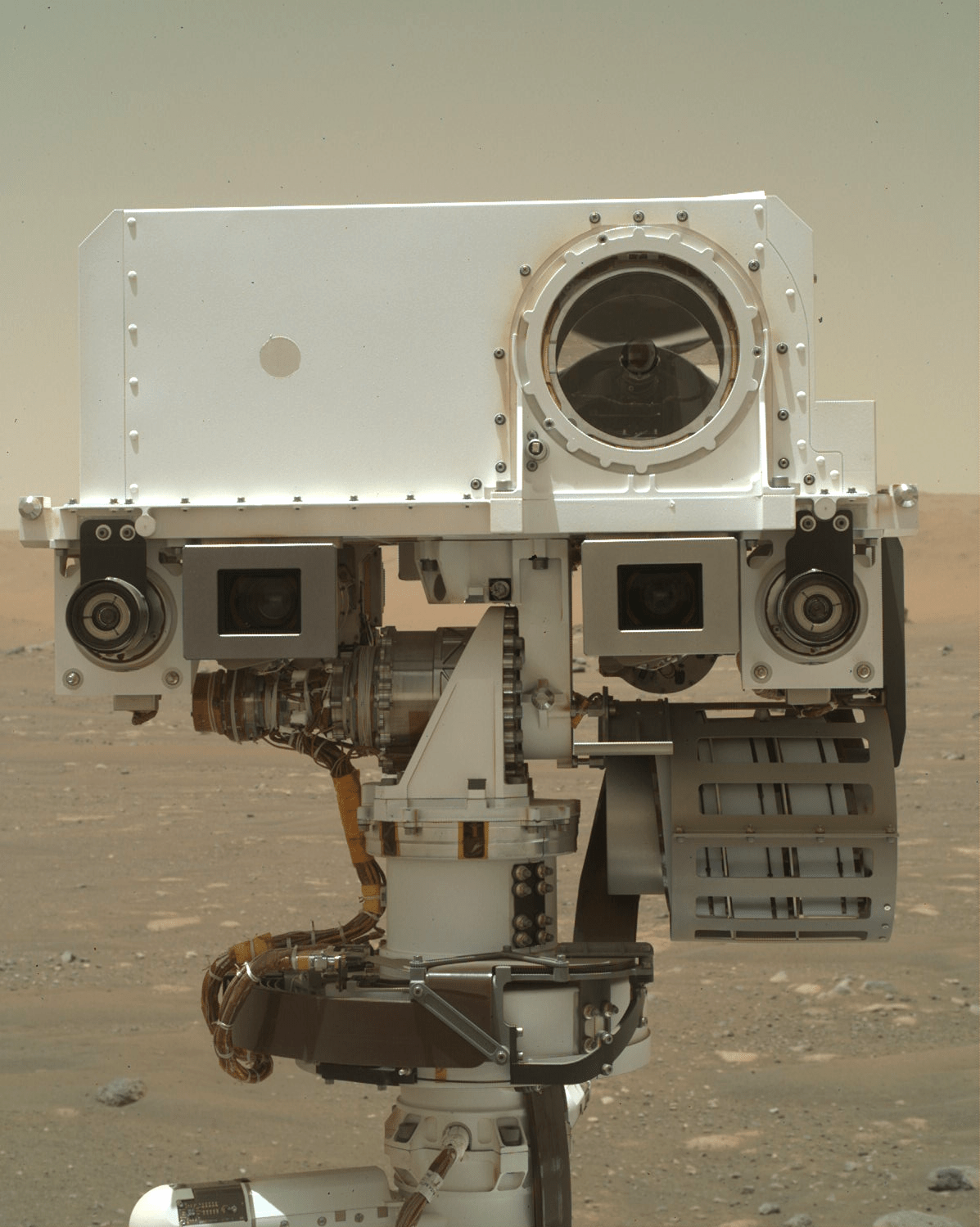
Planning today began with the news that Curiosity only made it about halfway to its intended destination from Monday. The drive terminated early after the rover exceeded one of its “suspension limits.” This refers to our “rocker-bogie” suspension system, which allows the rover to drive over obstacles while minimizing the motion experienced by the rover body. In this case, our right middle wheel is down in a trough while the right rear wheel is perched on a rock, causing the angle of the “bogie” connecting the two wheels to exceed the maximum allowed value (Those maximums are set with a healthy amount of safety margin, so we’re not in any danger!). You can see the state of the bogie in the image above. On top of that, ending the drive early also meant that we didn’t have the images that we usually use to determine if the rover is stable enough to unstow the arm, so some creative work was necessary to determine whether or not we could. Unsurprisingly, the verdict was that we shouldn’t do so while in this awkward-looking position.
As always, the team was quick to pivot to a remote sensing plan. The focus today was on getting any last-minute remote observations of the Gediz Vallis channel. This was because we decided that, rather than continuing to drive north, we would be starting our western turn toward the exit out of Gediz Vallis.
The first sol of today’s plan contains a hefty two hours of science activities. These include LIBS observations of a bedrock target “North Dome” and a pair of ChemCam passive rasters of “Jewelry Lake” and “Merced River,” two smaller rocks near the rover, the latter of which appears to have been broken open as the rover drove over it. Mastcam will then take a documentation image of North Dome, as well as a mosaic of some more bedrock at “Earthquake Dome.” This first sol also includes a set of environmental science observations, including a lengthy 30-minute dust devil movie, just over 10 minutes of Navcam cloud movies, and some Navcam monitoring of dust and sand on the rover deck. We also sneak in a Navcam line-of-sight mosaic of the north crater rim, to measure the amount of dust in the air after our drive.
The second sol is a fairly typical post-drive sol, beginning with a standard ChemCam AEGIS activity to let the rover autonomously select a LIBS target. The rest of the science time this sol is dedicated to environmental monitoring, including a Mastcam tau observation to monitor dust, some more Navcam deck monitoring, another Navcam cloud movie, and a 360-degree Navcam dust devil survey. No arm activities means the second sol also includes a Navcam shunt prevention activity (SPENDI) to burn off some extra power while also looking for clouds and dust devils. As always, REMS, RAD, and DAN will continue their standard activities throughout this plan.
When I joined the mission back in 2020, I would occasionally look at Gediz Vallis on our HiRISE maps and imagine what the view would be like between those tall, steep channel walls. So it seems almost unbelievable that we will soon be leaving Gediz Vallis behind us as we continue our trek up Mount Sharp. It will probably still be a few more weeks before we can say that we’ve officially exited Gediz Vallis, but I don’t think anyone will be saying they were disappointed with what we accomplished during this long-anticipated phase of the mission.
Onwards and upwards!
Written by Conor Hayes, graduate student at York University














{kind=link}